- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > MECHANICAL/AUTOMOBILE > 2019 > FABRICATION > INDUSTRIAL
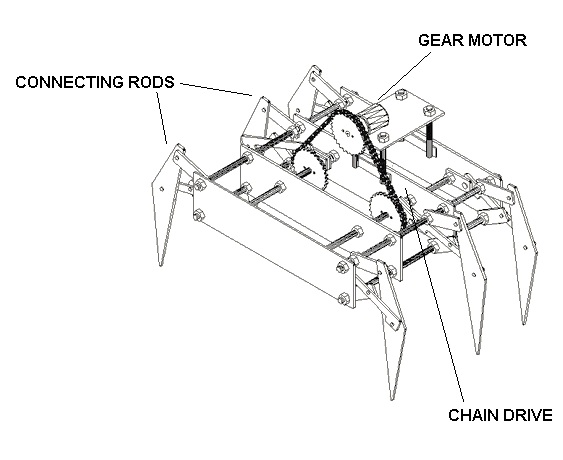
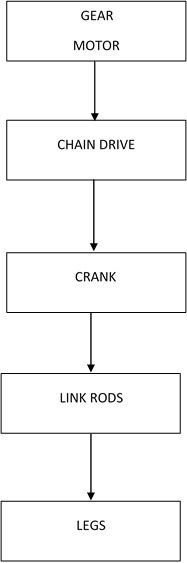
The aim of this project is to fabricate an eight legged robot called spider robot by using a walking algorithm named as klan mechanism. The most important thing is this robot requires no microprocessor or microcontroller or any type of actuator for its operations. It mainly consists of gear motor, connecting rods, frames etc. In this mechanism, link rods are connected by pivot joints and convert the rotation motion into leg movement similar to that of animal walking. The rotation of the crank allows the foot to be raised to a predetermined height before returning to the starting position and repeating the cycle. Two of these linkages are coupled together at the crank and one half cycle out of phase with each other will allow the frame of the robot to travel parallel to the ground.
BLOCK DIAGRAM
LINE DIAGRAM