- ALL COMPUTER, ELECTRONICS AND MECHANICAL COURSES AVAILABLE…. PROJECT GUIDANCE SINCE 2004. FOR FURTHER DETAILS CALL 9443117328
Projects > ELECTRONICS > 2017 > IEEE > DIGITAL IMAGE PROCESSING
Accurate road detection and centerline extraction from very high resolution (VHR) remote sensing imagery are of central importance in a wide range of applications. Due to the complex backgrounds and occlusions of trees and cars, most road detection methods bring in the heterogeneous segments; besides for the centerline extraction task, most current approaches fail to extract a wonderful centerline network that appears smooth, complete, as well as single-pixel width. To address the abovementioned complex issues, we propose a novel deep model, i.e., a cascaded end-to-end convolutional neural network (CasNet), to simultaneously cope with the road detection and centerline extraction tasks. Specifically, CasNet consists of two networks. One aims at the road detection task, whose strong representation ability is well able to tackle the complex backgrounds and occlusions of trees and cars. The other is cascaded to the former one, making full use of the feature maps produced formerly, to obtain the good centerline extraction. Finally, a thinning algorithm is proposed to obtain smooth, complete, and single-pixel width road centerline network.
Regression-Based Methods, Deep Convolutional Neural Network (DCNN), Fully Convolutional Network (FCN).
We propose a cascaded end-to-end convolutional neural network (CasNet) to simultaneously extract consistent road area and smooth road centerline from VHR remote sensing images. Specifically, two convolutional networks are concatenated into one framework. The first network is utilized to extract the road area. Due to the encoder and decoder layers, we can obtain more consistent road detection result than other comparing methods under complex backgrounds and occlusions of cars and trees. Through the second network and the thinning algorithm, the smooth, complete, and single-pixel width road centerline network can be achieved.
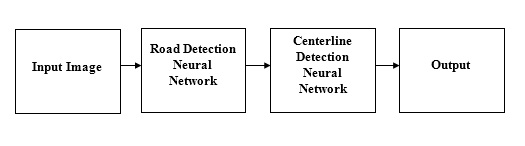
BLOCK DIAGRAM